Transformer 中的 position embedding 的设计
前言
Transformer 使用 Attention 结构来进行建模,在 NLP 和 CV 领域都有比较好的效果,其主要结构如下:
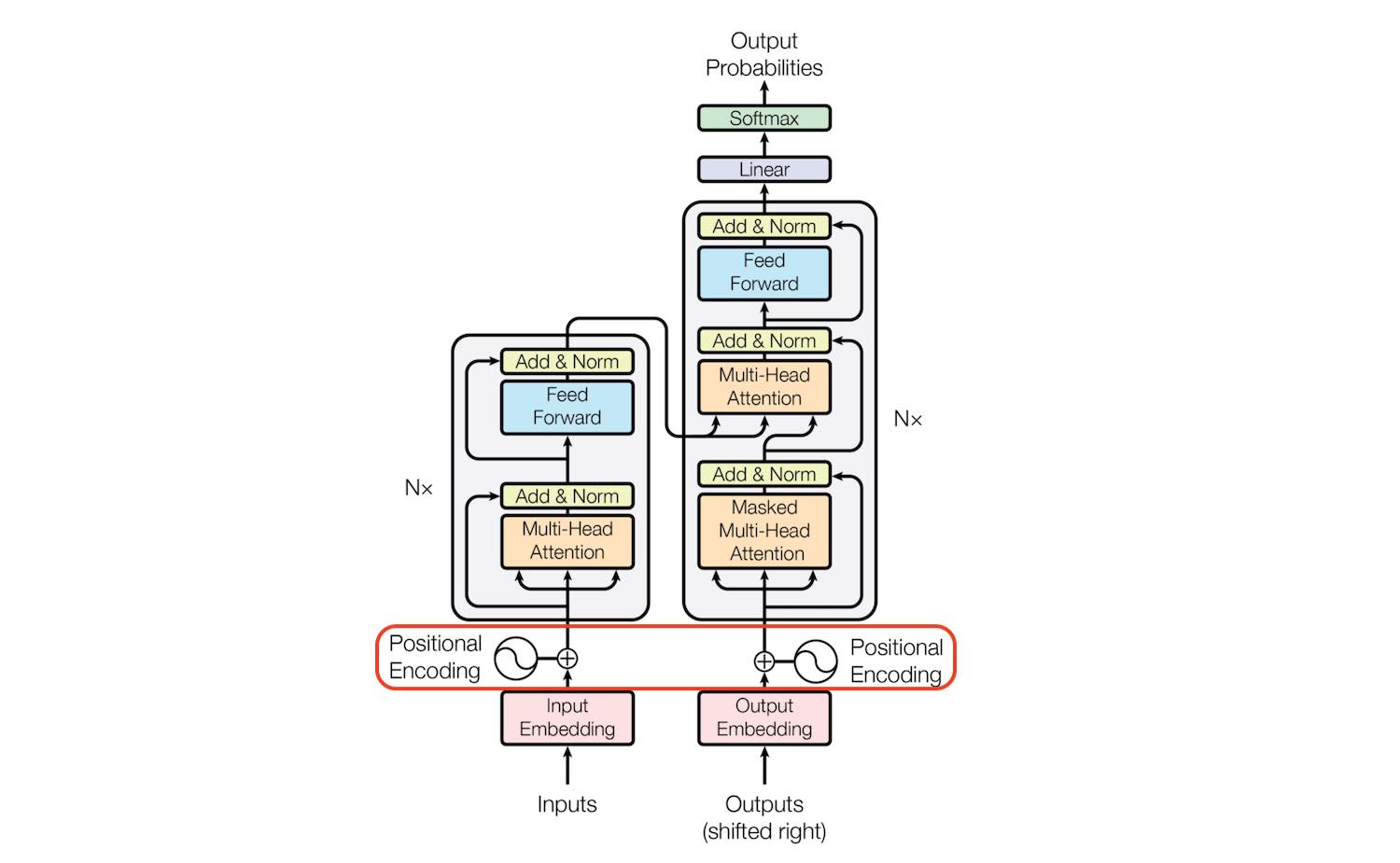
如果只取左边的部分,则退化为 BERT 类结构。 如果只取右边部分,则变成 GPT 类结构。
与lstm、rnn这种天然的流式结构不同,为了更高效地处理序列信息(并行计算),transformer的attention结构丢失了词汇的位置信息。如果不增加对位置信息的编码,则对于模型来说,乱序的词汇和正序的词汇没有分别。也即「今天 天气 真 好」和 「天气 真 今天 好」没有区别。
有两种常见的做法来引入位置关系:
- 绝对位置编码:设法将位置信息合并到输入 embedding 中,以相加为主。
- 相对位置编码:微调一下Attention结构,使得它有能力分辨不同位置的Token。
绝对位置编码
铺垫方法
用整型值标记位置
一种自然而然的想法是,给第一个token标记1,给第二个token标记2…,以此类推。这种方法产生了以下几个主要问题:
- 模型可能遇见比训练时所用的序列更长的序列。不利于模型的泛化,外推性可能存在问题。
- 模型的位置表示是无界的。随着序列长度的增加,位置值会越来越大。
用 [0,1] 范围标记位置
为了解决整型值带来的问题,可以考虑将位置值的范围限制在[0, 1]之内,其中,0表示第一个token,1表示最后一个token。比如有3个token,那么位置信息就表示成[0, 0.5, 1];若有四个token,位置信息就表示成[0, 0.33, 0.69, 1]。 (这里有点像线性插值)。
当序列长度不同时,token间的相对距离是不一样的。例如在序列长度为3时,token间的相对距离为0.5;在序列长度为4时,token间的相对距离就变为0.33。
用二进制向量标记位置
考虑到位置信息作用在input embedding上,因此比起用单一的值,更好的方案是用一个和input embedding维度一样的向量来表示位置。这时我们就很容易想到二进制编码。如下图,假设d_model = 4,那么我们的位置向量可以表示成:
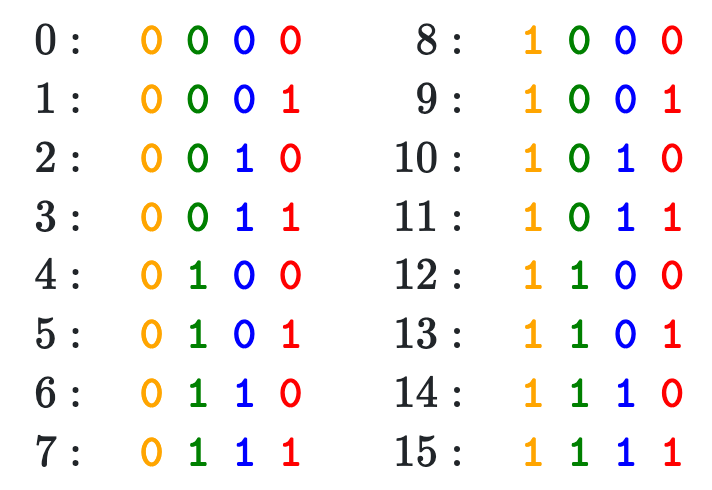
这里的变化是比较连续的,相近位置上的 embedding 距离也比较近。 但这种编码方式得到的位置编码处于一个离散空间中,我们很容易把 d_model = 4 个槽位用完,并且位置之间的距离变动可能会比较突兀。
如果能把离线空间转化为连续空间,就可以解决上述问题。
Sinusoidal
设计
其中 分别是位置 的编码向量的第 个分量, 是位置向量的维度。
1 | import torch |
可以看到
torch.pow(10000.0, 2*torch.arange(0, d_model//2)/d_model)和公式内的方法并不一样,原始公式的实现更像是被注释掉的实现。两者其实没有区别,但
ln10000相较于10000^x相比,计算量要小一些,所以会做这种转化。
下图是一串序列长度为50,位置编码维度为128的位置编码可视化结果:

可以发现,由于sin/cos函数的性质,位置向量的每一个值都位于[-1, 1]之间。同时,纵向来看,图的右半边几乎都是红色的,这是因为越往后的位置, 越小,频率越小,波长越长,所以不同的t对最终的结果影响不大。而越往左边走,颜色交替的频率越频繁。
特性
如何理解Transformer论文中的positional encoding,和三角函数有什么关系?
https://kazemnejad.com/blog/transformer_architecture_positional_encoding/#proposed-method
https://blog.timodenk.com/linear-relationships-in-the-transformers-positional-encoding/
sinusoidal 编码的另外的一个重要能力,是通过绝对编码的方式实现了相对编码
We chose this function because we hypothesized it would allow the model to easily learn to attend by relative positions, since for any fixed offset k, PEpos+k can be represented as a linear function of PEpos.
对于每组 sin-cos 都有对应的频率 ,为了方便公式定义,缩写其为 $\omega_k$。 需证明存在线性转化矩阵 (与 无关)满足如下等式:
证明:
令 为一个 的矩阵,我们定义 、、、 ,满足如下等式
三角函数
使用三角函数进行展开
于是得到了如下等式
通过解上述方程,得到了 、、、 的解
即 为:
可以看到,这里的矩阵 非常像旋转矩阵。
QA
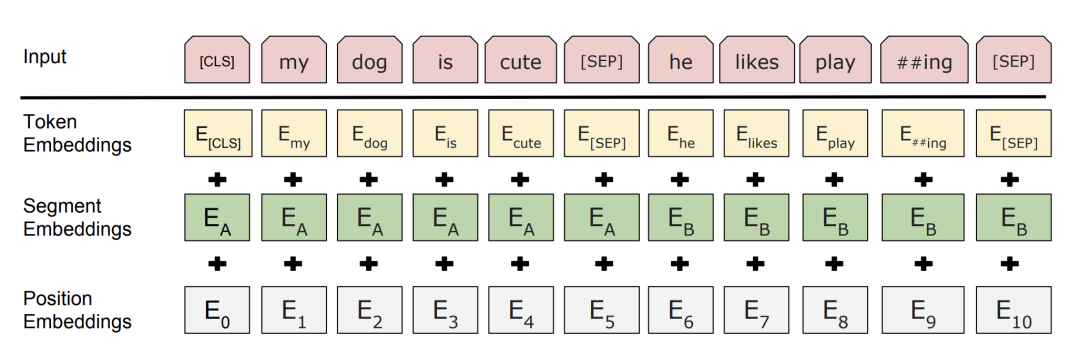
- postion embedding 为什么和 word embedding 相加?
这是一个历史非常悠久的问题,input_embedding = word_embedding + position_embedding + type_embedding ,3 种没有关系的 embedding 为什么可以直接相加呢。
有一些研究者给出了自己的答案,如 https://kazemnejad.com/blog/transformer_architecture_positional_encoding/#faq、[为什么 Bert 的三个 Embedding 可以进行相加?](https://www.zhihu.com/question/374835153) 。
我比较喜欢 保姆级教程,用PyTorch和BERT进行文本分类 - 机器学习社区的文章 - 知乎这个解释
Embedding 的数学本质,就是以 one hot 为输入的单层全连接。也就是说,世界上本没什么 Embedding,有的只是one hot。
假设 token Embedding 矩阵维度是 [4,768];position Embedding 矩阵维度是 [3,768];segment Embedding 矩阵维度是 [2,768]。
对于一个字,假设它的 token one-hot 是[1,0,0,0];它的 position one-hot 是[1,0,0];它的 segment one-hot 是[1,0]。
那这个字最后的 word Embedding,就是上面三种 Embedding 的加和。
如此得到的 word Embedding,和concat后的特征:[1,0,0,0,1,0,0,1,0],再过维度为 [4+3+2,768] = [9, 768] 的全连接层,得到的向量其实就是一样的。
- BERT 内的 postion embedding 用的是 Sinusoidal 吗?
不是,说一千道一万,BERT 内的 position embedding 是直接学习出来的。这可能是因为 BERT 本身限制了512 长度,所以直接学习要比各种公式的尝试更快一些。 Sinusoidal 是 transformer 提出的,而 BERT 虽然基本采用了 encode 侧,但 position embedding 上有一些 diff。
相对位置编码
相对位置并没有完整建模每个输入的位置信息,而是在算Attention的时候考虑当前位置与被Attention的位置的相对距离,由于自然语言一般更依赖于相对位置,所以相对位置编码通常也有着优秀的表现。
经典式
相对位置编码起源于Google的论文《Self-Attention with Relative Position Representations》,华为开源的NEZHA模型也用到了这种位置编码,后面各种相对位置编码变体基本也是依葫芦画瓢的简单修改。
一般认为,相对位置编码是由绝对位置编码启发而来,考虑一般的带绝对位置编码的Attention:
其中对那一维归一化,这里的向量都是指行向量。我们初步展开:
将 postion 相关的部分都丢弃掉,然后换上相对位置向量 ,得到了
以及换成:
所谓相对位置,是将本来依赖于二元坐标的向量,改为只依赖于相对距离$i-j$,并且通常来说会进行截断,以适应不同任意的距离
这样一来,只需要有限个位置编码,就可以表达出任意长度的相对位置(因为进行了截断),不管$\boldsymbol{p}_K,\boldsymbol{p}_V$是选择可训练式的还是三角函数式的,都可以达到处理任意长度文本的需求。
T5 类型
在之前的文章内提到过 T5 使用到的相对位置编码
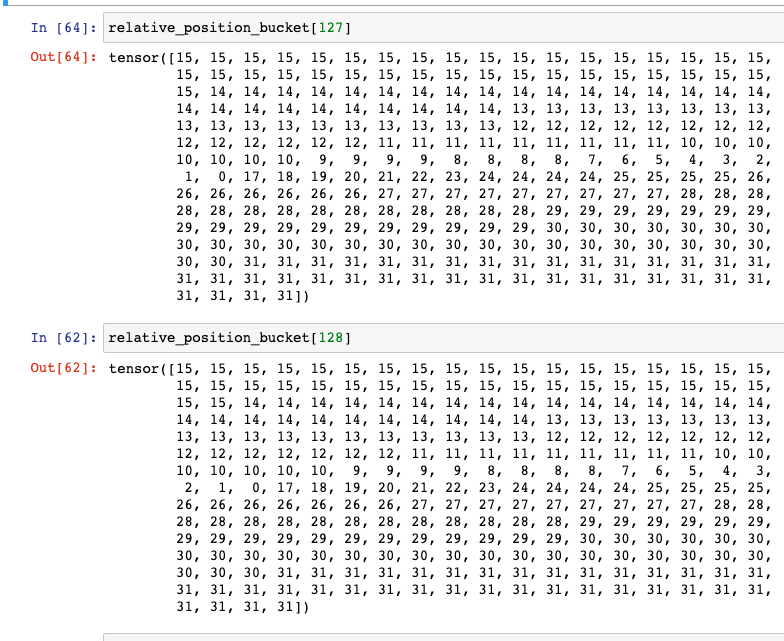
这个设计的思路其实也很直观,就是比较邻近的位置(0~7),我们需要比较得精细一些,所以给它们都分配一个独立的位置编码,至于稍远的位置(比如8~11),我们不用区分得太清楚,所以它们可以共用一个位置编码,距离越远,共用的范围就可以越大,直到达到指定范围再clip。
旋转位置编码
在这里先直接抛出一个直观的结论:
RoPE位置编码通过将一个向量旋转某个角度,为其赋予位置信息。
RoPE的出发点
接下来进入今天的主角RoPE位置编码。在绝对位置编码中,尤其是在训练式位置编码中,模型只能感知到每个词向量所处的绝对位置,并无法感知两两词向量之间的相对位置。对于Sinusoidal位置编码而言,这一点得到了缓解,模型一定程度上能够感知相对位置。
对于RoPE而言,作者的出发点为:通过绝对位置编码的方式实现相对位置编码。回顾我们此前定义的位置编码函数,该函数表示对词向量 添加绝对位置信息 ,得到 :
ROPE 希望 与 之间的点积, 即 中能够带有位置信息 。 那么 怎么才能算带有位置信息? 只要能将 表示成一个关于 、、 的函数 即可,其中 便表示着两个向量之间的相对位置信息。
因此我们建模莫表就变成了,找到一个函数 ,使得如下关系成立:
二维位置编码
为了简化问题,我们先假设词向量是二维的。作者借助复数来进行求解,在此我们省略求解过程,直接抛出答案,最终作者得到如下位置编码函数,其中 为位置下标, 为一个常数:
为了更好地理解上面的函数,我们先简单复习一下线性代数中的旋转矩阵。在二维空间中,存在一个旋转矩阵 ,当一个二维向量左乘旋转矩阵时,该向量即可实现弧度为 的逆时针旋转操作。
我们以二维向量 为例,将其逆时针旋转45度,弧度为 ,将得到新的二维向量 ,向量的模长未发生改变,仍然是1。计算过程如下

回看我们求解得到的位置编码函数 ,我们得到的是一个向量旋转的函数,左侧的 是一个旋转矩阵, 表示在保持向量 的模长的同时,将其逆时针旋转 。这意味着只需要将向量旋转某个角度,即可实现对该向量添加绝对位置信息,这就是旋转位置编码的由来。
我们进一步验证RoPE是否能通过绝对位置编码的方式实现相对位置编码。当我们求两个向量之间的点积会发现,它们的点积是一个关于 、 、 的函数,所以函数 实现了以绝对位置编码的方式实现相对位置编码。
这里用到了三角函数的一些性质
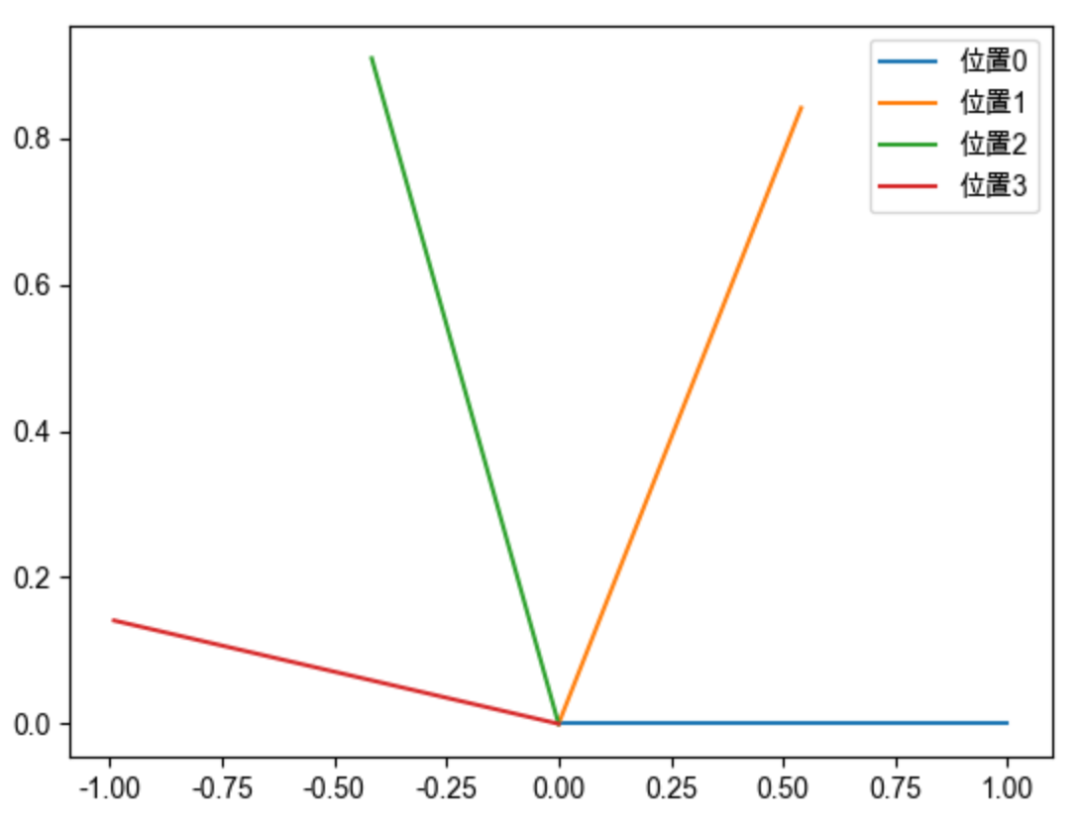
为了更加形象生动地理解旋转位置编码,我们结合图形描述如何为一个二维向量赋予位置编码。假设存在向量 ,位置编码函数 中的 是一个常量,我们不妨设为1,则:
向量 位于位置0,1,2,3时,分别将向量 旋转0,1,2,3弧度,就可以为其赋予对应的绝对位置信息。如下图所示,只需要对向量进行旋转操作,即可对向量添加对应的位置信息。并且向量旋转具有周期性。
推广到多维
上述我们介绍了如何为一个二维向量赋予绝对位置信息:旋转一定的角度即可。但我们知道词向量的维度一般是几百甚至上千,如何将我们上述旋转的结论推广到多维呢?分而治之即可,我们把高维向量,两两一组,分别旋转。最终高维向量的旋转可表示成如下公式,可以认为左侧便是高维向量的旋转矩阵:
借鉴Sinusoidal位置编码,我们可以将每个分组的 设为不同的常量,从而引入远程衰减的性质。这里作者直接沿用了Sinusoidal位置编码的设置, 。则我们可以将高维向量的旋转矩阵更新为如下:
上式中的旋转矩阵十分稀疏,为了节省算力,可以以下面的方式等效实现:
我们继续随机初始化两个向量q和k,将q固定在位置0上,k的位置从0开始逐步变大,依次计算q和k之间的内积。我们发现随着q和k的相对距离的增加,它们之间的内积分数呈现出远程衰减的性质,这正是我们希望的。
代码实现
参考 https://nn.labml.ai/transformers/rope/index.html#section-1
1 | class RotaryPositionalEmbeddings(nn.Module): |
可以发现 x_rope = (x_rope * self.cos_cached[:x.shape[0]]) + (neg_half_x * self.sin_cached[:x.shape[0]]) 前边部分全是 cos、后半部分全是 sin, 。 相当于距离 的距离进行 pair。
旋转位置编码(Rotary Positional Encoding, RoPE)之所以称为“旋转”,是因为它通过旋转矩阵来编码位置信息。这种编码方式的核心思想是利用旋转来表示序列中元素的位置,从而在处理位置信息时保持一定的灵活性。
RoPE的关键优点包括:
- 可适应任意序列长度:它能够灵活地适应不同长度的输入序列。
- 随距离增加的依赖性衰减:随着序列中元素之间距离的增加,它们之间的依赖性逐渐减弱。
- 在线性自注意力中引入相对位置编码:RoPE能够为线性自注意力机制提供相对位置编码的能力。
- 通过绝对位置编码的方式,实现了相对位置编码:避免了 position embedding 与 word_embedding 相加的问题。
小结
- 啥是外推性?
外推性是指大模型在训练时和预测时的输入长度不一致,导致模型的泛化能力下降的问题。例如,如果一个模型在训练时只使用了512个 token 的文本,那么在预测时如果输入超过512个 token,模型可能无法正确处理。这就限制了大模型在处理长文本或多轮对话等任务时的效果。
参考
Transformer Architecture: The Positional Encoding - Amirhossein Kazemnejad’s Blog
- 大模型为什么要用旋转位置编码(Rotary Position Embedding,RoPE) - 喝拿铁的皮卡丘的文章 - 知乎
https://zhuanlan.zhihu.com/p/670320068 - 为什么 Bert 的三个 Embedding 可以进行相加? - 海晨威的回答 - 知乎
https://www.zhihu.com/question/374835153/answer/1506279757 - https://kazemnejad.com/blog/transformer_architecture_positional_encoding/#proposed-method
- https://blog.timodenk.com/linear-relationships-in-the-transformers-positional-encoding/
- https://kexue.fm/archives/9675#%E7%BA%BF%E6%80%A7%E5%86%85%E6%8F%92
- https://kexue.fm/archives/8265
- https://kexue.fm/archives/8130/comment-page-2#comments
Transformer 中的 position embedding 的设计